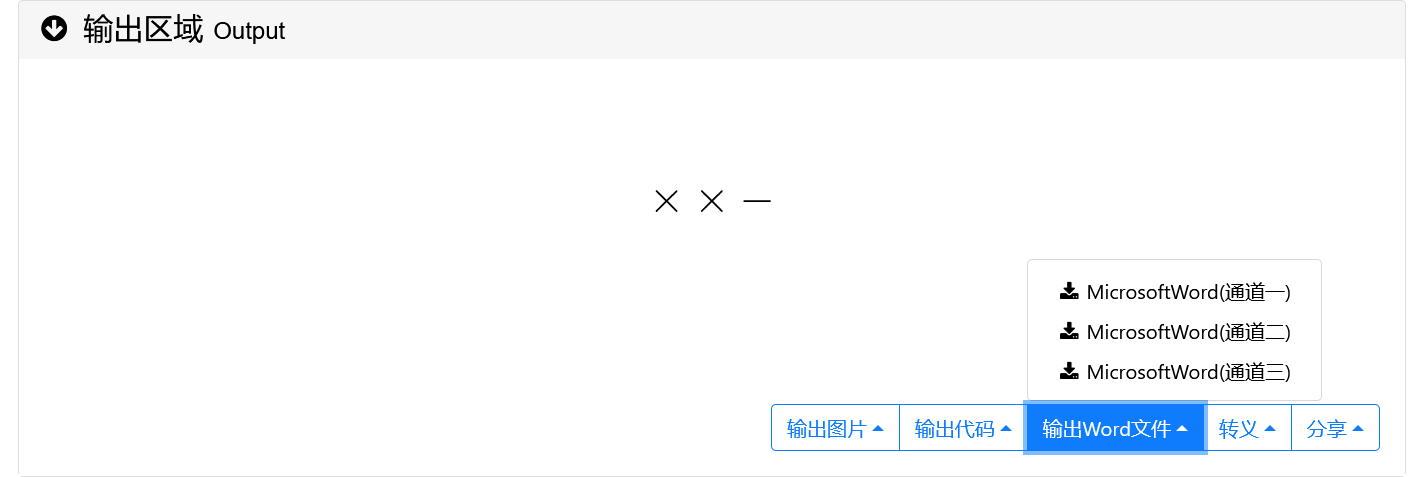
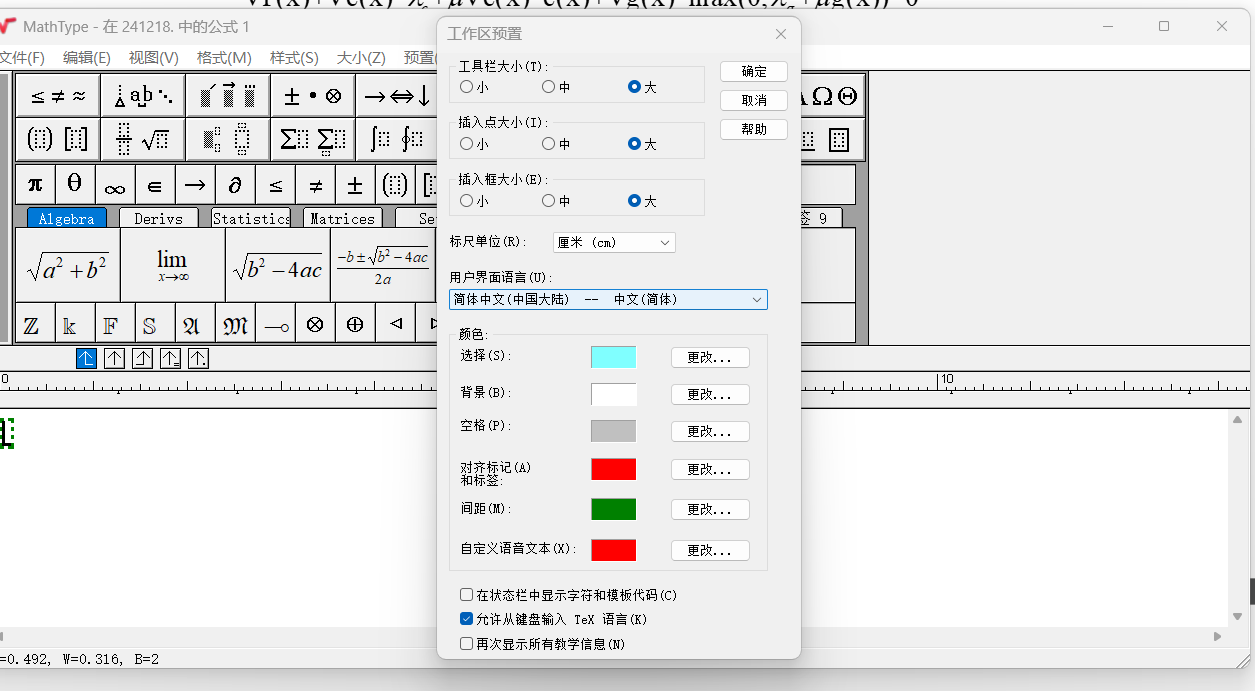
兄弟们,各位老友们,gpt里面写的公式和文字,如何复制到word里面呢?
比如这样:
4. 无人船路径规划与污染源在线追踪
为了高效、准确地定位和追踪水体中的污染源,本研究提出将无人船的路径规划与污染源在线追踪方法相结合。该方法通过实时采集水质数据,计算污染物浓度梯度,动态调整航行路径,逐步逼近污染源位置。
当污染物浓度梯度计算完成后,无人船通过装备的高精度水质传感器,实时采集该区域的水质参数(如污染物浓度 CC),并将数据传输至控制中心进行即时分析。无人船开始执行追踪任务,根据监测点位的水质数据,计算各项参数的空间梯度分布,公式为:
∇⃗C=∂C∂xi+∂C∂yj\vec{\nabla}C = \frac{\partial C}{\partial x} \mathbf{i} + \frac{\partial C}{\partial y} \mathbf{j}
梯度向量(∇⃗C\vec{\nabla}C)描述了污染物浓度 CC 在空间中的变化率,其中 ∂C∂x\frac{\partial C}{\partial x} 表示浓度在 xx 方向上的变化率,∂C∂y\frac{\partial C}{\partial y} 表示在 yy 方向上的变化率,i\mathbf{i} 和 j\mathbf{j} 分别是 xx 轴和 yy 轴的单位向量。梯度向量的方向指向污染物浓度增加最快的方向,其大小则表示浓度变化的速率。计算得到的梯度向量用于指导无人船的航行方向和路径调整。
无人船依据浓度梯度的方向和大小,调整航行路径,逐步逼近污染源。具体步骤如下:
首先,初始定位阶段,无人船前往污染物浓度较高的区域作为初始定位点。通过高精度水质传感器,实时采集该区域的水质参数,并将数据传输至控制中心进行分析。
接下来,梯度追踪阶段,无人船沿着浓度梯度上升的方向航行。航行方向角 θ\theta 可通过梯度向量的方向角计算得到:
θ=arctan(∂C∂y∂C∂x)\theta = \arctan\left(\frac{\frac{\partial C}{\partial y}}{\frac{\partial C}{\partial x}}\right)
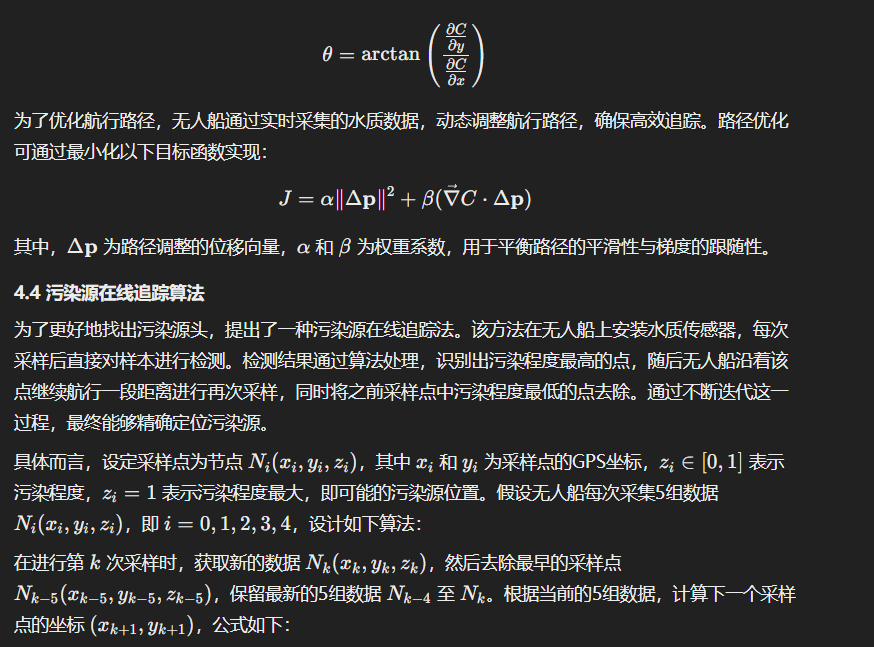
为了优化航行路径,无人船通过实时采集的水质数据,动态调整航行路径,确保高效追踪。路径优化可通过最小化以下目标函数实现:
J=α∥Δp∥2+β(∇⃗C⋅Δp)J = \alpha |\Delta \mathbf{p}|^2 + \beta (\vec{\nabla}C \cdot \Delta \mathbf{p})
其中,Δp\Delta \mathbf{p} 为路径调整的位移向量,α\alpha 和 β\beta 为权重系数,用于平衡路径的平滑性与梯度的跟随性。
4.4 污染源在线追踪算法
为了更好地找出污染源头,提出了一种污染源在线追踪法。该方法在无人船上安装水质传感器,每次采样后直接对样本进行检测。检测结果通过算法处理,识别出污染程度最高的点,随后无人船沿着该点继续航行一段距离进行再次采样,同时将之前采样点中污染程度最低的点去除。通过不断迭代这一过程,最终能够精确定位污染源。
具体而言,设定采样点为节点 Ni(xi,yi,zi)N_i(x_i, y_i, z_i),其中 xix_i 和 yiy_i 为采样点的GPS坐标,zi∈[0,1]z_i \in [0, 1] 表示污染程度,zi=1z_i = 1 表示污染程度最大,即可能的污染源位置。假设无人船每次采集5组数据 Ni(xi,yi,zi)N_i(x_i, y_i, z_i),即 i=0,1,2,3,4i = 0, 1, 2, 3, 4,设计如下算法:
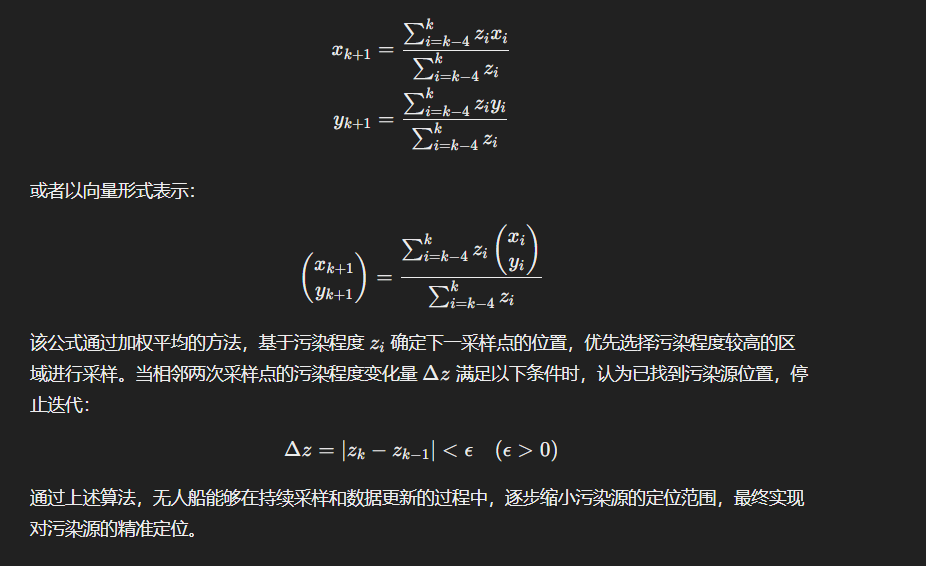
在进行第 kk 次采样时,获取新的数据 Nk(xk,yk,zk)N_k(x_k, y_k, z_k),然后去除最早的采样点 Nk−5(xk−5,yk−5,zk−5)N_{k-5}(x_{k-5}, y_{k-5}, z_{k-5}),保留最新的5组数据 Nk−4N_{k-4} 至 NkN_k。根据当前的5组数据,计算下一个采样点的坐标 (xk+1,yk+1)(x_{k+1}, y_{k+1}),公式如下:
xk+1=∑i=k−4kzixi∑i=k−4kziyk+1=∑i=k−4kziyi∑i=k−4kzi\begin{aligned} x_{k+1} &= \frac{\sum_{i=k-4}^{k} z_i x_i}{\sum_{i=k-4}^{k} z_i} \ y_{k+1} &= \frac{\sum_{i=k-4}^{k} z_i y_i}{\sum_{i=k-4}^{k} z_i} \end{aligned}
或者以向量形式表示:
(xk+1yk+1)=∑i=k−4kzi(xiyi)∑i=k−4kzi\begin{pmatrix} x_{k+1} \ y_{k+1} \end{pmatrix} = \frac{\sum_{i=k-4}^{k} z_i \begin{pmatrix} x_i \ y_i \end{pmatrix} }{\sum_{i=k-4}^{k} z_i}
该公式通过加权平均的方法,基于污染程度 ziz_i 确定下一采样点的位置,优先选择污染程度较高的区域进行采样。当相邻两次采样点的污染程度变化量 Δz\Delta z 满足以下条件时,认为已找到污染源位置,停止迭代:
Δz=∣zk−zk−1∣<ϵ(ϵ>0)\Delta z = |z_k - z_{k-1}| < \epsilon \quad (\epsilon > 0)
通过上述算法,无人船能够在持续采样和数据更新的过程中,逐步缩小污染源的定位范围,最终实现对污染源的精准定位。
注: 本节在结合路径规划与污染源在线追踪算法的基础上,详细阐述了无人船如何通过实时数据采集、梯度计算与路径优化,逐步逼近并定位污染源的位置。通过数学模型和算法流程的描述,确保了方法的科学性和可操作性,为环境监测与污染治理提供了有效的技术支持。
图片在这里: